-
 打磨達明機器人設(shè)計
打磨達明機器人設(shè)計Smart|智慧內(nèi)建智能視覺系統(tǒng):TM機器人將視覺系統(tǒng)與軟硬件設(shè)備進行了整合,是全球款內(nèi)建視覺的協(xié)作機器人,您再也無需像過去一樣面對復雜的視覺組件。內(nèi)建視覺包含樣板比對、對象定位、影像增強、條碼辨別、色彩分類等功能,通過簡單設(shè)定即可輕松完成機器人任務(wù)編輯。高彈...
2025-05-09 -
 北京AMR視覺AI協(xié)作機器人加工
北京AMR視覺AI協(xié)作機器人加工機器視覺技術(shù)在自動化行業(yè)中的典型應(yīng)用如今,自動化技術(shù)在我國正在飛速發(fā)展。人們對機器視覺有了更深刻地理解,他們對機器視覺的看法也發(fā)生了巨大的變化。機器視覺系統(tǒng)提高了生產(chǎn)中的自動化程度,從而使其可以在不適用于手動操作的危險工作環(huán)境中使用,從而可以大批量連續(xù)生產(chǎn)生產(chǎn)...
2025-05-08 -
 遼寧3D視覺AI協(xié)作機器人控制
遼寧3D視覺AI協(xié)作機器人控制機器視覺檢測系統(tǒng)通常采用CCD(ChargeCoupledDevice)照相機攝取檢測圖像,將其轉(zhuǎn)化為數(shù)字信號,再采用先進的計算機硬件與軟件技術(shù)對圖像數(shù)字信號進行處理,從而得到所需要的各種目標圖像特征值,并在此基礎(chǔ)上實現(xiàn)模式識別,坐標計算,灰度分布圖等多種功能...
2025-05-08 -
 北京沖壓視覺AI協(xié)作機器人分類
北京沖壓視覺AI協(xié)作機器人分類機器視覺系統(tǒng)是通過機器視覺產(chǎn)品將被攝取目標轉(zhuǎn)換成圖像信號,傳送給的圖像處理系統(tǒng),得到被攝目標的形態(tài)信息,根據(jù)像素分布和亮度、顏色等信息,轉(zhuǎn)變成數(shù)字化信號;圖像系統(tǒng)對這些信號進行各種運算來抽取目標的特征,進而根據(jù)判別的結(jié)果來控制現(xiàn)場的設(shè)備動作。機器視覺是一項綜合...
2025-05-07 -
 遼寧咖啡視覺AI協(xié)作機器人制作
遼寧咖啡視覺AI協(xié)作機器人制作在基本術(shù)語中,機器人視覺涉及使用相機硬件和計算機算法的組合,以允許機器人處理來自世界的視覺數(shù)據(jù)。例如,您的系統(tǒng)可能有一個2D攝像頭,可以檢測機器人拾取的對象。更復雜的例子可能是使用3D立體相機引導機器人將輪子安裝到移動的車輛上。沒有RobotVision,您的...
2025-05-07 -
江蘇移動搬運視覺AI協(xié)作機器人廠家
這些年以半導體和電子電器發(fā)展為主導,帶動了機器視覺需求的迅猛上漲,隨著全球半導體市場突破4000億美元大關(guān),機器視覺市場也在不斷增長。同時,從“中國制造2025”戰(zhàn)略提出至今,機器人產(chǎn)業(yè)也突飛猛進,這也讓作為機器人“眼睛”的機器視覺一路水漲船高。我國專利申請帶...
2025-05-07 -
 加工機床達明機器人推薦
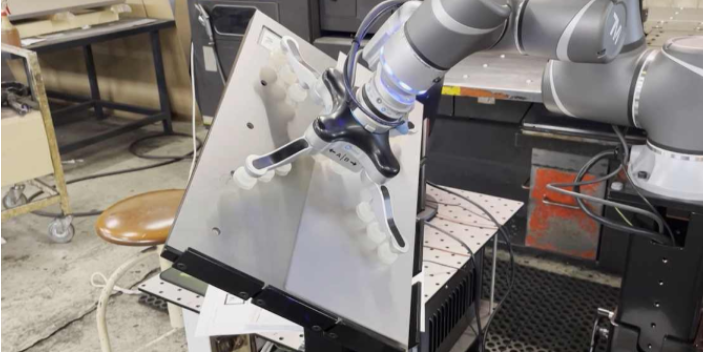
加工機床達明機器人推薦達明機器人內(nèi)建視覺及TMlandmark技術(shù),演示了如何通過技術(shù)實現(xiàn)精細辨別、自動補正目標物的角度偏差和高度變化,無需變更周邊生產(chǎn)布局便可實現(xiàn)測試站的自動化升級改造。達明機器人軟硬件全新升級的TMRobotS系列,具有更智慧的視覺與周邊軟件整合、更直覺操作的人...
2025-05-06 -
 珠海達明機器人工作原理
珠海達明機器人工作原理Safe|安全安全協(xié)作:TM機器人符合ISO10218-1及更新安規(guī)ISO/TS15066中人類與機器人協(xié)同工作的安全要求。當機器人偵測到物體撞擊,便會立即停止移動,保障人員安全。無壓力操作環(huán)境:TMRobot通過技術(shù)創(chuàng)新以及各種貼心的安全設(shè)計,使您在操作過程...
2025-05-06 -
 重慶自動貼標視覺AI協(xié)作機器人設(shè)計
重慶自動貼標視覺AI協(xié)作機器人設(shè)計達明機器人投入人工智能AI視覺,業(yè)界整合傳統(tǒng)機器視覺與先進AI視覺于單一機器人系統(tǒng),無須額外控制器,更大幅降低以往整合視覺花費的人力、時間與金錢成本。達明機器人內(nèi)建的機器視覺整合了光源、工業(yè)攝相機與感測組件,來擷取影像畫面,并結(jié)合人工智能的深度學習技術(shù),更能準...
2025-05-06 -
 江蘇視覺AI協(xié)作機器人模型
江蘇視覺AI協(xié)作機器人模型近年來,隨著技術(shù)的不斷發(fā)展,工業(yè)機器人正朝著智能化方向蓬勃發(fā)展。在物流行業(yè)中,機器人配合3D視覺系統(tǒng)可替代人工,實現(xiàn)對貨物分揀、檢測、識別、碼垛以及拆垛等自動化作業(yè)。3D機器視覺通過3D快速成像技術(shù),獲得物體高精度的三維點云數(shù)據(jù),通過和視覺算法分析物體的形狀、...
2025-05-05 -
 安徽倉庫搬運視覺AI協(xié)作機器人哪家好
安徽倉庫搬運視覺AI協(xié)作機器人哪家好生產(chǎn)線中,我們需要確定產(chǎn)品的空間三維坐標,才能進行自動化生產(chǎn)的下一步動作,避免整個自動化設(shè)備成為無頭蒼蠅,通過工業(yè)相機對產(chǎn)品進行拍照抓取,視覺軟件的分析對比,獲得產(chǎn)品的準確位置,從而開始下一步的生產(chǎn)動作。圖像識別顧名思義就是處理分析我們獲得的圖像信息,通過識別...
2025-05-05 -
 山東車用零配件視覺AI協(xié)作機器人定制
山東車用零配件視覺AI協(xié)作機器人定制對于機器人,讓工業(yè)機械手或機器人“睜開”一雙眼睛,機器視覺為它們提供了精密的計算系統(tǒng)和處理系統(tǒng),可以模擬生物視覺成像和信息處理方法,從而使機器人更像人類,并且可以靈活地執(zhí)行操作,識別,比較和處理方案,生成執(zhí)行指令,然后一次性完成所有操作。這是傳統(tǒng)機器人目前無法...
2025-05-04 -
 廣州電子件組裝視覺AI協(xié)作機器人控制
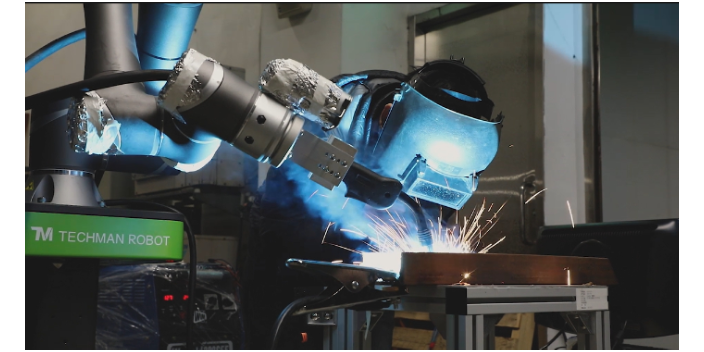
廣州電子件組裝視覺AI協(xié)作機器人控制利用安裝于機器人焊槍行走方向的后部的攝像頭,在焊接弧光照射下獲取機器人運動后方向的半部熔池變化圖像。經(jīng)過算法提取熔池形狀特征如:寬度,半長,面積,形狀特征信息等。在根據(jù)這些信息,通過控制機結(jié)合相應(yīng)的工藝參數(shù)和預先建立的焊接熔池動態(tài)過程模型預測熔深,熔透,熔寬和...
2025-05-04 -
 浙江AOI檢測視覺AI協(xié)作機器人加工
浙江AOI檢測視覺AI協(xié)作機器人加工在工業(yè)應(yīng)用領(lǐng)域,相當有有代表性的機器人視覺系統(tǒng)就是機器人手眼系統(tǒng)。根據(jù)成像單元安裝方式不同,機器人手眼系統(tǒng)分為兩類:固定成像單元眼看手系統(tǒng)(Eye-to-Hand)和隨動成像單元眼在手系統(tǒng)(Eye-in-HandorHand-Eye)。在Eye-to-Hand...
2025-05-04 -
遼寧AOI檢測視覺AI協(xié)作機器人制作
對于機器人,讓工業(yè)機械手或機器人“睜開”一雙眼睛,機器視覺為它們提供了精密的計算系統(tǒng)和處理系統(tǒng),可以模擬生物視覺成像和信息處理方法,從而使機器人更像人類,并且可以靈活地執(zhí)行操作,識別,比較和處理方案,生成執(zhí)行指令,然后一次性完成所有操作。這是傳統(tǒng)機器人目前無法...
2025-05-04 -
四川組裝視覺AI協(xié)作機器人工作原理
機器視覺在藥品生產(chǎn)中的應(yīng)用藥品的生產(chǎn)和加工過程非常嚴格,任何小錯誤都可能造成嚴重后果。通過機器視覺,可以實現(xiàn)對藥品生產(chǎn)過程的質(zhì)量控制和管理控制,例如對片劑的形狀、數(shù)量、包裝質(zhì)量的監(jiān)控,可以提高藥品和包裝的質(zhì)量,保證安全的患者。機器視覺在產(chǎn)品表面質(zhì)量檢測中的應(yīng)用...
2025-05-03 -
 深圳打磨視覺AI協(xié)作機器人設(shè)計
深圳打磨視覺AI協(xié)作機器人設(shè)計軟包拆垛機器人軟包拆垛多用于食品、化工行業(yè)等粉狀、顆粒狀物品的投料、搬運類物流場景。軟包由于其自身易變形,碼放垛型不規(guī)則,運輸后松散等原因,無法單純的依靠機器人示教位置完成拆垛,3D視覺幫助機器人實現(xiàn)軟包的實時三維位置定位,引導機器人完成軟包拆垛自動化工作。料...
2025-05-03 -
 靈活識別視覺AI協(xié)作機器人哪家好
靈活識別視覺AI協(xié)作機器人哪家好當前的協(xié)作機器人領(lǐng)域,視覺應(yīng)用需求巨大,機器人與視覺結(jié)合的技術(shù)和產(chǎn)品可以解決大部分的自動化需求,視覺應(yīng)用將成為實現(xiàn)智能制造2025的關(guān)鍵推動技術(shù),同時搭配視覺的機器人將在生活場景中被使用。節(jié)卡機器人在視覺方面已實現(xiàn)缺陷檢測、外觀檢測、工件定位、特征識別、以及三...
2025-05-03 -
 浙江餐飲零售視覺AI協(xié)作機器人聯(lián)系電話
浙江餐飲零售視覺AI協(xié)作機器人聯(lián)系電話達明機器人推出工廠智能管理系統(tǒng)——TMmanager。它是一套針對工廠制程與設(shè)備進行智能管理的工業(yè)圖控軟件,具備實時系統(tǒng)監(jiān)控、數(shù)據(jù)分析的自動化管理系統(tǒng)。達明TMmanager開發(fā)手臂管理系統(tǒng)(RMS),無縫銜接達明協(xié)作手臂,實時監(jiān)測機械手臂運作狀況以及生產(chǎn)現(xiàn)場...
2025-05-03 -
浙江組裝視覺AI協(xié)作機器人
在流水化作業(yè)生產(chǎn)、產(chǎn)品質(zhì)量檢測方面,需要機器視覺觀察、識別、發(fā)現(xiàn)生產(chǎn)環(huán)節(jié)中的錯誤和疏漏。機器視覺系統(tǒng)的特點是提高生產(chǎn)的柔性和自動化程度。在一些不適合于人工作業(yè)的危險工作環(huán)境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺;同時,在大批量工業(yè)生產(chǎn)過程中,...
2025-05-03 -
 遼寧AOI檢測視覺AI協(xié)作機器人批發(fā)
遼寧AOI檢測視覺AI協(xié)作機器人批發(fā)3D機器視覺技術(shù)作為人工智能關(guān)鍵底層技術(shù)之一,憑借真實三維環(huán)境感知和目標定位識別能力,為各類機器人開啟“慧眼”,實現(xiàn)了在工業(yè)、農(nóng)業(yè)、、科學研究、交通運輸、商業(yè)、醫(yī)療、服務(wù)和家庭等眾多領(lǐng)域的產(chǎn)品化,應(yīng)用邊界與規(guī)模持續(xù)擴大。隨著應(yīng)用場景日益復雜和智能化程度加速躍升...
2025-05-03 -
珠海焊接視覺AI協(xié)作機器人分類
當前的協(xié)作機器人領(lǐng)域,視覺應(yīng)用需求巨大,機器人與視覺結(jié)合的技術(shù)和產(chǎn)品可以解決大部分的自動化需求,視覺應(yīng)用將成為實現(xiàn)智能制造2025的關(guān)鍵推動技術(shù),同時搭配視覺的機器人將在生活場景中被使用。節(jié)卡機器人在視覺方面已實現(xiàn)缺陷檢測、外觀檢測、工件定位、特征識別、以及三...
2025-05-03 -
遼寧汽車門拋光視覺AI協(xié)作機器人圖片
表面貼裝技術(shù)(SMT)是指以PCB為基礎(chǔ)進行加工的一系列工藝流程。電子元器件的小型化、器件貼裝的高密度、器件引腳陣列的復雜化和多樣化,都對現(xiàn)代SMT設(shè)備提出了更高的要求。通過使用機器視覺定位、測量和檢測技術(shù),可以提高SMT設(shè)備的生產(chǎn)效率,提高貼裝精度和提高連續(xù)...
2025-05-03 -
遼寧組裝視覺AI協(xié)作機器人聯(lián)系電話
如果機器設(shè)備和機器人具備視覺能力,那就可以提升性能,我們可以更靈活地使用它們。將工業(yè)相機和圖像處理系統(tǒng)與機器人相結(jié)合可以實現(xiàn)哪些應(yīng)用?有哪些因素需要考慮呢?現(xiàn)代工業(yè)機器人通常配備一定數(shù)量的傳感器,例如,可用于探測被抓取的部件,或在有碰撞危險時立即停止移動。但是...
2025-05-02 -
江蘇3C電子行業(yè)視覺AI協(xié)作機器人定制
利用安裝于機器人焊槍行走方向的后部的攝像頭,在焊接弧光照射下獲取機器人運動后方向的半部熔池變化圖像。經(jīng)過算法提取熔池形狀特征如:寬度,半長,面積,形狀特征信息等。在根據(jù)這些信息,通過控制機結(jié)合相應(yīng)的工藝參數(shù)和預先建立的焊接熔池動態(tài)過程模型預測熔深,熔透,熔寬和...
2025-05-02 -
北京打標機視覺AI協(xié)作機器人價格
視覺機器人是視覺系統(tǒng)通過相機采集圖像,經(jīng)過計算機的處理分析,模擬人類視覺的功能,之后根據(jù)視覺結(jié)果控制機器人進行相應(yīng)的運動動作,實現(xiàn)期望的功能。隨著科技的發(fā)展,視覺技術(shù)正逐步成為工業(yè)生產(chǎn)的關(guān)鍵組成部分。通常在工業(yè)生產(chǎn)過程中,需要從一堆雜亂無序、大小、外觀相同或不...
2025-05-02 -
 山東3C電子行業(yè)視覺AI協(xié)作機器人品牌
山東3C電子行業(yè)視覺AI協(xié)作機器人品牌生產(chǎn)線中,我們需要確定產(chǎn)品的空間三維坐標,才能進行自動化生產(chǎn)的下一步動作,避免整個自動化設(shè)備成為無頭蒼蠅,通過工業(yè)相機對產(chǎn)品進行拍照抓取,視覺軟件的分析對比,獲得產(chǎn)品的準確位置,從而開始下一步的生產(chǎn)動作。圖像識別顧名思義就是處理分析我們獲得的圖像信息,通過識別...
2025-05-02 -
上海打磨視覺AI協(xié)作機器人編程
機器視覺技術(shù)在自動化行業(yè)中的典型應(yīng)用如今,自動化技術(shù)在我國正在飛速發(fā)展。人們對機器視覺有了更深刻地理解,他們對機器視覺的看法也發(fā)生了巨大的變化。機器視覺系統(tǒng)提高了生產(chǎn)中的自動化程度,從而使其可以在不適用于手動操作的危險工作環(huán)境中使用,從而可以大批量連續(xù)生產(chǎn)生產(chǎn)...
2025-05-02 -
 廣州移動搬運視覺AI協(xié)作機器人機構(gòu)
廣州移動搬運視覺AI協(xié)作機器人機構(gòu)在工業(yè)應(yīng)用領(lǐng)域,相當有有代表性的機器人視覺系統(tǒng)就是機器人手眼系統(tǒng)。根據(jù)成像單元安裝方式不同,機器人手眼系統(tǒng)分為兩類:固定成像單元眼看手系統(tǒng)(Eye-to-Hand)和隨動成像單元眼在手系統(tǒng)(Eye-in-HandorHand-Eye)。在Eye-to-Hand...
2025-05-02 -
 吉林靈活識別復合機器人批發(fā)
吉林靈活識別復合機器人批發(fā)協(xié)作機器人可以簡化物料搬運、分揀、上下料和裝箱操作,將工人從單一枯燥且繁重的工作中解放出來。再通過達明機器人集成創(chuàng)夾具及視覺,即使在非結(jié)構(gòu)化環(huán)境中,達明機器人也能識別、拾取各種物體,部署于復雜度更的自動化生產(chǎn)流程中。且達明機器人易于編程,用戶更可以通過其示教器...
2025-05-02