江蘇振動(dòng)臺(tái)控制設(shè)備
在結(jié)構(gòu)疲勞測(cè)試中,有時(shí)需要對(duì)結(jié)構(gòu)在共振頻率點(diǎn)處振動(dòng)一段時(shí)間。EDM的正弦測(cè)試中包含了搜索和共振峰的功能。本節(jié)介紹如何實(shí)現(xiàn)這種測(cè)試–共振搜索和駐留(RSTD)。當(dāng)系統(tǒng)處于強(qiáng)迫狀態(tài)時(shí),其峰值位移、速度和加速度響應(yīng)會(huì)發(fā)生輕微不同的強(qiáng)迫頻率。共振頻率被定義為響應(yīng)到達(dá)局部**大值的頻率。這些共振是:位移共振頻率速度共振頻率加速度共振頻率對(duì)于阻尼比小于,三種共振頻率之間的差異可以忽略不計(jì)。尋找共振的直接方法是測(cè)量力激勵(lì)信號(hào)與結(jié)構(gòu)響應(yīng)信號(hào)(加速度、速度或位移)之間的傳遞函數(shù)。共振將被看作是傳遞函數(shù)曲線上的峰值。不幸的是,這種方法在許多振動(dòng)臺(tái)測(cè)試中是不實(shí)用的,因?yàn)榱y(cè)量不容易獲得。相反,傳遞性測(cè)量通常被用來尋找共振。加速度傳輸測(cè)量是根據(jù)兩個(gè)加速度計(jì)的響應(yīng)計(jì)算的,一個(gè)在振動(dòng)臺(tái)上,另一個(gè)在測(cè)試的結(jié)構(gòu)上。傳遞性被定義為兩點(diǎn)之間響應(yīng)的比率。響應(yīng)加速計(jì)可能不止有一個(gè),并且會(huì)針對(duì)每個(gè)響應(yīng)加速度計(jì)計(jì)算傳遞函數(shù)。為這些參考和響應(yīng)加速計(jì)選擇合適的安裝位置至關(guān)重要。錯(cuò)誤的位置可能會(huì)讓你找不到到一些共振點(diǎn)。同樣,如果響應(yīng)和參考通道放置反了,則**振將顯示為共振。參考通道的加速度計(jì)應(yīng)該安裝在振動(dòng)臺(tái)上能精確記錄基本運(yùn)動(dòng)的位置處。 沖擊響應(yīng)譜用于描述瞬態(tài)和沖擊波形對(duì)單自由度機(jī)械系統(tǒng)的影響。江蘇振動(dòng)臺(tái)控制設(shè)備
動(dòng)態(tài)測(cè)量功能Spider-80Xi執(zhí)行許多動(dòng)態(tài)信號(hào)分析功能,包括數(shù)據(jù)記錄,(+,-,*,/)等算數(shù)運(yùn)算,積分,微分,加窗函數(shù),F(xiàn)FT譜,平均值,功率譜,互譜,傳遞函數(shù)FRF,相干分析,實(shí)時(shí)過濾,RMS,正弦掃頻,極限值,警報(bào)/終止等。黑盒工作模式Spider-80Xi能使用黑盒模式,它容許脫離PC進(jìn)行數(shù)據(jù)采集操作。在這個(gè)模式下,PC電腦只用于測(cè)試前配置系統(tǒng),然后在測(cè)試完成后下載數(shù)據(jù)。測(cè)試期間,前端可按照預(yù)先設(shè)定的時(shí)間表或各種外部設(shè)備如使用Wi-FI的PDA或IPad操作。實(shí)時(shí)信號(hào)分析功能◎數(shù)學(xué)運(yùn)算(+、-、*、/)、積分/微分、RMS、峰值、平均、概率統(tǒng)計(jì)。◎加窗、FFT、ZoomFFT、自功譜/互功譜、頻率響應(yīng)FRF,相干、自相關(guān)。◎?qū)崟r(shí)濾波器:抽點(diǎn)、IIR、FIR、FIR-Remez、FIR-Window◎倍頻程分析、階次、閾值報(bào)警等◎單雙面動(dòng)平衡。 四川單軸控制源頭廠家三軸同步核電零部件測(cè)量。
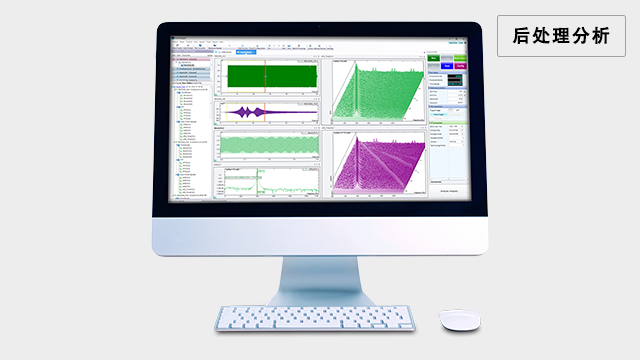
軸心軌跡在時(shí)域中使用兩個(gè)數(shù)據(jù)通道來顯示,來自兩個(gè)通道的信號(hào)繪制在X和Y平面上,以顯示軸位置變化與旋轉(zhuǎn)角度的關(guān)系。軸心軌跡顯示給出了旋轉(zhuǎn)軸運(yùn)動(dòng)的二維視覺圖像。該功能位于動(dòng)態(tài)信號(hào)分析系統(tǒng)中的后處理軟件(PA)中。一個(gè)平衡良好的軸,在任何方向都不會(huì)移動(dòng),并會(huì)在(軸心軌跡)圖中間產(chǎn)生一個(gè)點(diǎn)。軸運(yùn)動(dòng)可以給出振動(dòng)源的指示,例如如果有很多上/下運(yùn)動(dòng),可能是機(jī)座沒有擰緊。要?jiǎng)?chuàng)建軌跡圖,您需要采用雙通道同時(shí)測(cè)量水平軸和垂直軸上的數(shù)據(jù)。位移或加速度傳感器位置必須相互間隔90°。軸心軌跡顯示采用時(shí)域中的測(cè)量對(duì)。它不需要階次技術(shù)。
瞬態(tài)隨機(jī)測(cè)試(又瞬態(tài)隨機(jī))輸出一個(gè)隨機(jī)沖擊信號(hào)來模擬真實(shí)自然環(huán)境的沖擊。它適用于有隨機(jī)屬性的沖擊脈沖。目標(biāo)功率譜定義方式與隨機(jī)相同,另外需要定義瞬態(tài)脈沖間隔。應(yīng)用包括模擬***聲或道路模擬。這個(gè)功能需要硬件版本在,支持512個(gè)輸入通道。對(duì)于瞬態(tài)隨機(jī)測(cè)試,下面的選項(xiàng)可供選擇線性加速度:這是**常用的默認(rèn)設(shè)置。它允許使用加速度進(jìn)行。目標(biāo)譜將被設(shè)置為加速度。角加速度:這種模式允許旋轉(zhuǎn)振動(dòng)篩系統(tǒng)做。線性加速度計(jì)是用來測(cè)量輸入時(shí)的線性加速度信號(hào),但是使用角加速度做。輸入測(cè)得的信號(hào)被轉(zhuǎn)換成角加速度信號(hào),以匹配目標(biāo)譜。該轉(zhuǎn)換所需的半徑的值是必需的,并且用戶在通道表中的每個(gè)通道旁邊輸入這個(gè)值。該目標(biāo)譜使用角加速度定義,單位rad/s2。非加速度:該模式中,用戶可以從物理量下拉列表中選擇需要的量綱。**常用的量是力,位移和速度。使用下圖所示的下拉菜單選擇量綱,目標(biāo)譜將以相同的量綱定義。通道表中的量綱會(huì)根據(jù)下拉菜單中選擇的輸入測(cè)量量綱自動(dòng)切換。在此模式下振動(dòng)臺(tái)參數(shù)限制將不起作用,所以用戶需要仔細(xì)定義目標(biāo)譜,以保證安全運(yùn)行。 多軸振動(dòng)系統(tǒng)MIMO-VCS。

便攜性配置Spider-80Xi是一個(gè)輕巧、緊湊型高通道數(shù)據(jù)采集系統(tǒng)和動(dòng)態(tài)信號(hào)分析系統(tǒng),設(shè)有64個(gè)通道,機(jī)架重量小于,它便于攜帶,非常適合現(xiàn)場(chǎng)測(cè)試。Spider80Xi是Spider-80X的精簡(jiǎn)版,它的設(shè)計(jì)去除了機(jī)架內(nèi)每個(gè)模塊卡的外殼。Spider-80Xi的模塊卡被固定在一個(gè)機(jī)架中,不支持熱插拔操作。重量和尺寸都得到了進(jìn)一步精簡(jiǎn),單手便可攜帶。高動(dòng)態(tài)測(cè)量范圍:Spider的性能在同行業(yè)的高通道動(dòng)態(tài)測(cè)量系統(tǒng)產(chǎn)品中位于前列,擁有專利,160dB的輸入通道測(cè)量范圍(在時(shí)域中定義)。每個(gè)測(cè)量通道檢測(cè)小至6μV和大至±20V這種高動(dòng)態(tài)范圍技術(shù)使得Spider-80Xi不需要象傳統(tǒng)數(shù)據(jù)采集設(shè)備那樣設(shè)置輸入量程/放大系數(shù)。 動(dòng)力電池路況全模擬振動(dòng)測(cè)試。河南4通道控制器
MDOF 道路模擬試驗(yàn)系統(tǒng)。江蘇振動(dòng)臺(tái)控制設(shè)備
銳達(dá)已經(jīng)制定出一種協(xié)同的解決方案,包括定制的硬件和應(yīng)用軟件。我們的Spider-80X模塊是一個(gè)完整的多通道分析儀與振動(dòng)器,與IEEE1588精密時(shí)間協(xié)議(PTP)時(shí)間以太網(wǎng)通信。它可以用工作站或PC和我們的工程數(shù)據(jù)管理(EDM)軟件完成多個(gè)復(fù)雜的測(cè)量任務(wù)。此后,PC可以(可選地)斷開連接,并在黑盒模式下運(yùn)行,而不需要附加的計(jì)算機(jī)。Spider可以通過蘋果平板電腦iPad?使用我們的EDMiPad應(yīng)用程序。EDM是我們所有振動(dòng)系統(tǒng)(VCS)和動(dòng)態(tài)信號(hào)分析儀(DSA)的標(biāo)準(zhǔn)化人機(jī)接口。無論具體的應(yīng)用程序、通道數(shù)或語(yǔ)言(英語(yǔ)、日語(yǔ)、中文、俄語(yǔ)),用戶界面都呈現(xiàn)相同的外觀和感覺。通過EDM,用戶可以創(chuàng)建自定義接口,并**簡(jiǎn)化了特定產(chǎn)品測(cè)試的操作界面。用戶還可以使用XML、OpenOffice、PDF和MicrosoftWord模板生成自定義報(bào)告。江蘇振動(dòng)臺(tái)控制設(shè)備
- 上海控制設(shè)備廠家 2025-05-14
- 云南振動(dòng)測(cè)試控制系統(tǒng) 2025-05-14
- 廣東路譜控制技術(shù) 2025-05-14
- 黑龍江振動(dòng)測(cè)試控制技術(shù) 2025-05-14
- 吉林隨機(jī)控制設(shè)備 2025-05-14
- 云南隨機(jī)控制儀器 2025-05-14
- 江蘇振動(dòng)臺(tái)控制設(shè)備 2025-05-14
- 吉林隨機(jī)控制應(yīng)用 2025-05-13
- 陜西振動(dòng)臺(tái)控制供應(yīng)商 2025-05-13
- 廣西控制器 2025-05-13
- 重慶WeidmullerSAKDU2.5N接插件 2025-05-14
- 靜安區(qū)出口儀器儀表銷售降價(jià) 2025-05-14
- 工業(yè)園區(qū)特色石無鉛價(jià)格 2025-05-14
- 山西光伏鋁合金導(dǎo)軌費(fèi)用 2025-05-14
- 汕尾酒店客控智能方案費(fèi)用 2025-05-14
- 南京進(jìn)口電子絕緣材料廠家現(xiàn)貨 2025-05-14
- 杭州負(fù)壓式加氯機(jī)價(jià)格 2025-05-14
- 國(guó)產(chǎn)動(dòng)力鋰電池保護(hù)板品牌 2025-05-14
- 宿遷綠色數(shù)控外圓磨床設(shè)計(jì) 2025-05-14
- 皇姑區(qū)什么是變頻電機(jī) 2025-05-14