青海運維機器人生產廠家
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.通過定期地對光伏電池板進行清掃,可顯著提高光伏發電量。青海運維機器人生產廠家

原鋁的積累量不斷增加,廢料回收有巨大的發展潛力。鋁合金的回收和再生是一項十分復雜的技術工作,由于各種鋁制品使用范圍寬廣而且分散,如何回收、集中、分類、實現再生加工是一項十分繁雜龐大的系統工程。全世界不同合金成分、不同性能的鋁合金數以百計,其中許多合金中的成分元素相互排斥,互不兼容,如何以**簡易的方法、比較低廉的成本和***的工藝使廢鋁的再生成分合乎理想合金要求,其性能滿足使用需要,質量能達到或接近原生材料的水平,是世界和國正在追求的目標。目前發達國家已形成了較為完善的廢雜鋁收集、熔煉、管理、分檢系統,適應不斷擴大的市場需求。河南電站清洗機器人報價表光伏有三種清潔方式:人工清潔,水車清潔和機器人清潔。
國自機器人獲評首臺(套)項目一覽,2014年變電站KYN開關柜智能操控機器人;2015年基于多驅動單元同步控制的重載搬運機器人;2016年面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔!
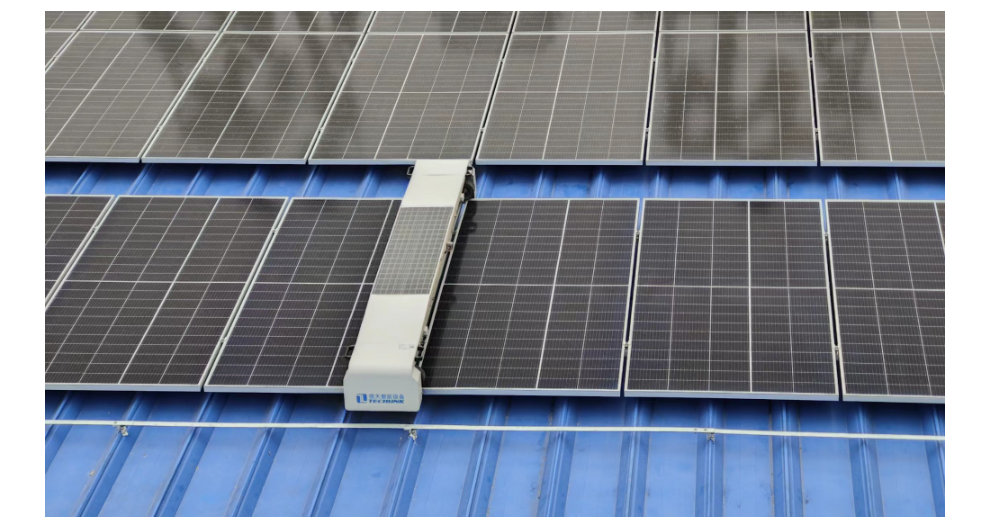
輥刷拼接設計,易于組裝和維護!自適應傾斜行走驅動裝置可輕松應對光伏組件陣列從上到下、從左到右、從前到后的變化;光伏組件的框架用作軌道,無需鋪設軌道,成本低,便于現場安裝和施工。自適應跟蹤裝置**提高了光伏組件陣列橋接的施工效率,縮短了施工周期;電控系統抗干擾能力強,耐高低溫,可靠性和穩定性好;**控制實現所有清潔機器人的智能調度;這是目前理想的光伏組件清潔方案;機器人清潔效率是人工清潔的3-5倍、成本低(*為手動清潔成本的30%-50%)等諸多優點!光伏有三種清潔方式:人工清潔、水車清潔和機器人清潔。

光伏清掃機器人是一種特定應用于光伏電站的清潔機器人,旨在提高光伏電站的發電量和收益。它可以清潔光伏板表面的灰塵、污垢和鳥糞等污染物,提高光伏板的發電效率,同時減少人工清潔的時間和成本。光伏清掃機器人通常由以下幾個部分組成:清潔毛刷:清潔毛刷是光伏清掃機器人的**部分,螺旋式毛刷可以深度清潔光伏板表面的灰塵、污垢和鳥糞等污染物。行走輪:光伏清掃機器人的行走路可以直接行走在光伏組件邊框上。控制系統:清掃機器人采用先進的控制系統,可以實現機器人的自主導航和避障。電池組:清掃機器人采用高效的磷酸鐵鋰電池,自充自用。
智能清掃機器人的小巧靈活的設計,能夠適應不同規格和安裝環境的光伏面板。河南電站清洗機器人
光伏組件的框架用作軌道,無需鋪設軌道,成本低,便于現場安裝和施工。青海運維機器人生產廠家
光伏組件清掃機器人一、人工干洗光伏板操作人員采用長柄絨拖布配合**洗塵劑進行清洗,干洗的工作周期約為3天/10MW,費用約為12000-13000元/10MW。主要原理:利用靜電吸附原理,具有吸附灰塵和沙粒的作用,增強塵推吸塵去污能力,能有效地避免在清掃時的灰塵沙粒飛揚。人工干洗光伏板的缺點:不同操作工的力量不同,對組件造成的壓力不同,會使得組件變形過大,造成電池片隱裂,另外一個缺點是,干洗組件效果不佳,常常因拖把沾有過多灰塵,在組件表面上留有部分痕跡,造成大面積陰影遮擋。
青海運維機器人生產廠家
- 青海光伏清掃機器人廠家價格 2025-05-02
- 青海運維機器人生產廠家 2025-05-02
- 廣東智能清洗機器人廠家 2025-05-02
- 新疆電站清掃機器人費用 2025-05-02
- 湖南運維機器人多少錢 2025-05-02
- 遼寧光伏掃地機器人價格 2025-05-02
- 吉林光伏智能清洗機器人廠家價格 2025-05-02
- 河南電站清洗機器人報價表 2025-05-02
- 西藏光伏智能清洗機器人 2025-05-02
- 廣西光伏清洗機器人報價 2025-05-02
- 廣東水冷型光學計量儀器報價 2025-05-02
- 廣東自動化CNC物聯管理平臺常用知識 2025-05-02
- 深圳彩煌熱電萬瓦激光功率傳感器OEM 2025-05-02
- 江蘇機械臥式螺帶混合機調試 2025-05-02
- 國產雕銑機價格 2025-05-02
- 無錫微型清洗機 2025-05-02
- 常州機械密封常見問題 2025-05-02
- 氮化鎵砂輪價格 2025-05-02
- 湖北ECTFE HALAR哪里買 2025-05-02
- 昆明小型活塞蒸汽壓縮機設備 2025-05-02