-
 吉林工業自動化伺服電動缸
吉林工業自動化伺服電動缸高速伺服電動缸以其極快的響應速度和運動速度,滿足了高速加工、快速定位等應用場景的需求。其作用在于提高生產效率,縮短加工周期。工作原理上,高速伺服電動缸采用高性能伺服電機和優化的傳動機構,通過先進的控制算法實現快速、精確的運動控制,為高速工業生產提供了有力保障。...
2025-06-11 -
 精密電缸生產
精密電缸生產防爆電缸在易燃易爆等危險環境中發揮著至關重要的作用,確保設備的安全運行和人員的生命安全。其作用在于防止因電氣火花或高溫引發的轟炸事故,為危險環境提供可靠的動力支持。工作原理上,防爆電缸采用特殊的防爆設計和材料,如隔爆型外殼、本質安全型電路等,將可能產生火花或高...
2025-06-11 -
 重慶多級伺服壓機
重慶多級伺服壓機彈性測試伺服壓機主要用于材料的彈性性能測試。在材料研發和生產過程中,了解材料的彈性性能對于保證產品質量和性能至關重要。彈性測試伺服壓機可以精確控制施加在材料上的壓力和變形量,通過測量材料的應力 - 應變曲線,準確評估材料的彈性模量、屈服強度、斷裂強度等力學性能...
2025-06-11 -
 天津電缸哪家好
天津電缸哪家好多級電缸通過多級伸縮結構,實現了在有限空間內的大行程運動,同時保持了高精度控制。其作用在于滿足那些需要長距離、高精度直線運動的復雜應用場景,如大型設備的精密定位、自動化倉儲系統的貨物搬運等。工作原理上,多級電缸由多個相互嵌套的缸體組成,每個缸體都能獨自伸縮。通...
2025-06-11 -
 耳軸伺服電動缸系統
耳軸伺服電動缸系統多級伺服電動缸通過多級伸縮結構,實現了在有限空間內的大行程運動,同時保持了高精度控制。其作用特別適用于需要長距離移動且對精度要求極高的應用場景,如航空航天領域的飛行器舵面控制。工作原理上,多級伺服電動缸的每一級都配備獨自的驅動和傳動機構,通過協同工作實現整體伸...
2025-06-11 -
 吉林高精度伺服電動缸
吉林高精度伺服電動缸多級伺服電動缸通過多級伸縮結構,實現了在有限空間內的大行程運動,同時保持了高精度控制。其作用特別適用于需要長距離移動且對精度要求極高的應用場景。工作原理上,多級伺服電動缸的每一級都配備獨自的驅動和傳動機構,通過協同工作實現整體伸縮。這種設計不僅提高了行程范圍,...
2025-06-10 -
廣東exlar電缸
防爆電缸在易燃易爆等危險環境中發揮著至關重要的作用,確保設備的安全運行和人員的生命安全。其作用在于防止因電氣火花或高溫引發的轟炸事故,為危險環境提供可靠的動力支持。工作原理上,防爆電缸采用特殊的防爆設計和材料,如隔爆型外殼、本質安全型電路等,將可能產生火花或高...
2025-06-10 -
 伺服壓機改造
伺服壓機改造航空航天領域對設備的精度、可靠性和穩定性要求極高,伺服壓機在該領域有著不可或缺的應用。在航空航天零部件的制造中,如飛機發動機葉片、航天器結構件等,伺服壓機能夠精確控制加工過程中的壓力和變形量,保證零部件的高精度和高質量。其高精度的壓力控制可以避免零部件在加工過...
2025-06-10 -
 60噸六自由度平臺訂購
60噸六自由度平臺訂購多級六自由度平臺通過多級結構的設計,實現了更為復雜和精細的運動控制。這種平臺在多個領域有著獨特的應用價值。在科研實驗中,多級六自由度平臺能夠模擬出更加逼真的運動場景,為研究人員提供更準確的實驗數據。例如,在航空航天領域,它可以模擬飛行器在不同飛行階段的各種姿態...
2025-06-10 -
 機械伺服壓機生產
機械伺服壓機生產電動伺服壓機以電力為動力源,具有節能環保、操作方便等優點。它采用電動伺服驅動系統,能夠精確控制電機的轉速、轉矩和位置,實現對壓力和行程的高精度調節。電動伺服壓機普遍應用于各個工業領域,如機械制造、電子制造、食品加工等。在機械制造中,電動伺服壓機可以用于零件的壓...
2025-06-10 -
 哈爾濱伺服壓機廠商
哈爾濱伺服壓機廠商高速伺服壓機以其快速響應和高速運行的特點,適用于大批量生產和高效率加工的場景。在汽車零部件、電子元件等行業的生產中,高速伺服壓機能夠在短時間內完成大量的壓裝任務,提高生產效率。其先進的伺服控制系統可以實現快速的壓力調整和行程控制,減少加工時間。例如,在電子元件...
2025-06-10 -
 石油化工六自由度平臺直銷
石油化工六自由度平臺直銷人形機器人六自由度平臺為人形機器人的運動提供了基礎支撐,使得機器人能夠模擬人類的各種動作和姿態。在服務機器人領域,人形機器人六自由度平臺可讓機器人實現行走、抓取、操作等功能,為人類提供更加便捷的服務。在科研實驗中,人形機器人六自由度平臺可用于研究人類的運動學和...
2025-06-10 -
 貴州步進電缸
貴州步進電缸折返式電缸通過特殊的機械結構,在有限的空間內實現了直線運動的往復運動,特別適用于對空間要求苛刻的場合。其作用在于節省空間的同時,保持高效的運動性能。工作原理上,折返式電缸采用折返式絲杠或連桿機構,將電機的旋轉運動轉換為推桿的直線往復運動。這種設計不僅減小了整體...
2025-06-10 -
 寧德伺服電動缸供應
寧德伺服電動缸供應精密伺服電動缸以其極高的定位精度和重復定位精度,滿足了精密加工、測量儀器等領域對微小位移的精確控制需求。其作用在于實現微米級甚至納米級的定位精度,確保加工和測量的準確性。工作原理上,精密伺服電動缸采用高精度編碼器、傳感器和先進的控制算法,實時反饋運動狀態并調整...
2025-06-10 -
 廈門微型伺服壓機
廈門微型伺服壓機航空航天領域對設備的精度、可靠性和穩定性要求極高,伺服壓機在該領域有著不可或缺的應用。在航空航天零部件的制造中,如飛機發動機葉片、航天器結構件等,伺服壓機能夠精確控制加工過程中的壓力和變形量,保證零部件的高精度和高質量。其高精度的壓力控制可以滿足航空航天零部件...
2025-06-10 -
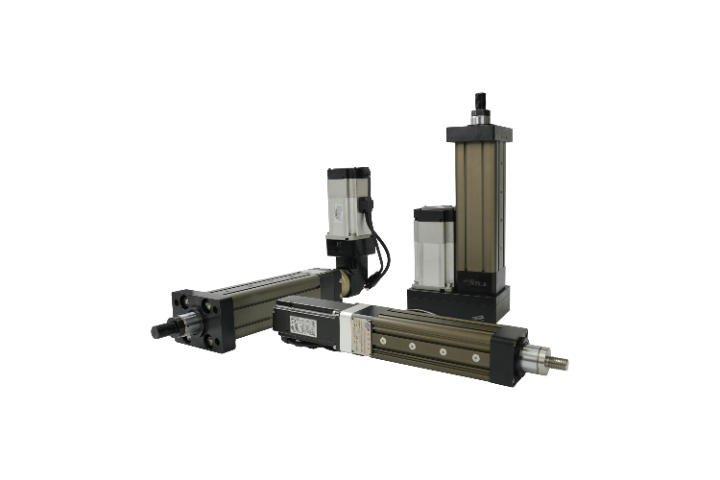 折返式伺服電動缸設備
折返式伺服電動缸設備伺服電動缸作為工業自動化領域的中心組件,其作用在于將電能高效轉換為直線運動,實現機械部件的精確定位與運動控制。其工作原理基于伺服電機與絲杠機構的緊密結合,伺服電機接收控制信號后,驅動絲杠旋轉,進而將旋轉運動轉換為直線運動。通過閉環控制系統,伺服電動缸能夠實時反...
2025-06-10 -
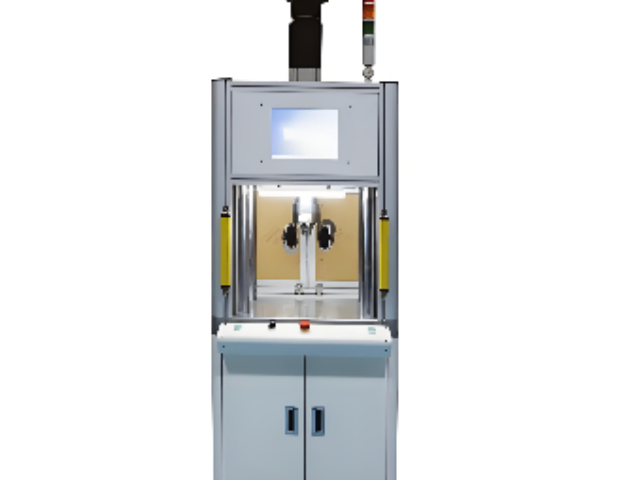
成都伺服壓機定制
伺服壓機作為一種先進的壓力加工設備,在現代工業生產中發揮著至關重要的作用。它采用伺服電機驅動,結合高精度的控制系統,能夠實現對壓力、速度和位置的精確控制。與傳統的壓力機相比,伺服壓機具有更高的靈活性、精度和效率。其工作原理是通過伺服電機帶動絲桿或曲柄連桿機構,...
2025-06-10 -
長沙金屬加工伺服壓機
質量判定伺服壓機在產品質量檢測中發揮著重要作用。它可以通過對產品的壓力測試、尺寸檢測等方式,判斷產品是否符合質量標準。在產品的生產過程中,質量判定伺服壓機可以對半成品和成品進行實時檢測,及時發現產品中的缺陷和問題。例如,在電子元件的制造中,它可以檢測元件的引腳...
2025-06-10 -
 寧德鋰電池伺服壓機
寧德鋰電池伺服壓機航空航天領域對設備的精度、可靠性和穩定性要求極高,伺服壓機在該領域有著不可或缺的應用。在航空航天零部件的制造中,如飛機發動機葉片、航天器結構件等,伺服壓機能夠精確控制加工過程中的壓力和變形量,保證零部件的高精度和高質量。其高精度的壓力控制可以滿足航空航天零部件...
2025-06-10 -
 北京液壓六自由度平臺
北京液壓六自由度平臺微型六自由度平臺以其小巧的體積和靈活的運動能力,在微觀領域和精密操作中展現出獨特的優勢。在生物醫學領域,它可用于細胞操作、微創手術模擬等,能夠精確控制微小的運動,為醫學研究和臨床實踐提供有力工具。在微電子制造中,微型六自由度平臺可實現微小零件的精確裝配和檢測,...
2025-06-10 -
折返式伺服壓機供應
塑料器件的制造過程中,伺服壓機發揮著重要作用。在塑料的注塑成型后,往往需要進行后續的加工和組裝,伺服壓機在這些環節中能夠提供精確的壓力控制。在塑料零件的壓裝過程中,伺服壓機可以根據塑料零件的材質和尺寸,精確調整壓裝力和壓裝速度,避免塑料零件因壓力過大而損壞,同...
2025-06-10 -
 電動六自由度平臺哪家好
電動六自由度平臺哪家好人形機器人六自由度平臺為人形機器人的運動提供了基礎支撐,使得機器人能夠模擬人類的各種動作和姿態。在服務機器人領域,人形機器人六自由度平臺可讓機器人實現行走、抓取、操作等功能,為人類提供更加便捷的服務。在科研實驗中,人形機器人六自由度平臺可用于研究人類的運動學和...
2025-06-10 -
廣東汽車裝備六自由度平臺
折返式六自由度平臺具有獨特的折返結構,這種結構使得平臺在運動過程中能夠實現更復雜的軌跡和姿態調整。在機器人領域,折返式六自由度平臺可用于機器人的關節設計和運動模擬,提高機器人的靈活性和適應性。在模擬訓練方面,如飛行模擬訓練,折返式六自由度平臺能夠模擬出更加真實...
2025-06-10 -
 合肥伺服壓機價格
合肥伺服壓機價格在電子行業中,伺服壓機是不可或缺的關鍵設備。電子產品的制造過程對精度和質量要求極高,伺服壓機憑借其精確的控制能力,能夠滿足電子行業的嚴格要求。在芯片封裝環節,伺服壓機可以精確控制壓力和壓裝速度,確保芯片與基板之間的連接牢固且穩定,避免出現虛焊、短路等問題。在電...
2025-06-10 -
大連六自由度平臺定做
并聯六自由度平臺采用并聯機構,具有剛度高、承載能力強、運動精度高等優點。在精密加工領域,并聯六自由度平臺可用于精密機床的運動補償,提高機床的加工精度和穩定性。在光學測量中,并聯六自由度平臺能夠精確控制測量儀器的位置和姿態,保證測量結果的準確性和可靠性。其獨特的...
2025-06-10 -
 電動伺服壓機
電動伺服壓機金屬加工行業對設備的力量和精度要求較高,伺服壓機在金屬加工中具有卓著優勢。在金屬的沖壓、鍛造、壓鑄等工藝中,伺服壓機能夠精確控制壓力和速度,提高加工質量和效率。在沖壓工藝中,伺服壓機可以根據不同的金屬材料和沖壓件形狀,調整沖壓壓力和速度,避免金屬材料的破裂和變...
2025-06-10 -
 山西六自由度平臺結構
山西六自由度平臺結構六自由度平臺是一種具備六個運動自由度(三個平移自由度和三個旋轉自由度)的先進設備,在眾多領域發揮著關鍵作用。它通過復雜的機械結構和精確的控制系統,能夠模擬出各種復雜的空間運動姿態。在科研領域,六自由度平臺可用于模擬飛行器的飛行狀態、船舶的航行姿態等,為科研人員...
2025-06-10 -
 山西電缸定制
山西電缸定制直線電缸和直線式電缸直接實現直線運動,無需中間轉換機構,提高了運動效率和精度。它們的作用在于為各種需要直線推拉的設備提供穩定、精確的動力支持,如自動化裝配線、機器人手臂等。工作原理上,這些電缸通過伺服電機驅動絲杠或滑軌,將旋轉運動轉換為直線運動。結合高精度的位...
2025-06-10 -
 山西六自由度平臺設計
山西六自由度平臺設計精密六自由度平臺以其高精度的運動控制能力,在精密制造和科研領域占據重要地位。在半導體制造行業,精密六自由度平臺可用于晶圓的精密定位和加工,保證芯片的生產質量。其運動精度能夠達到微米甚至納米級別,滿足半導體制造對高精度的要求。在光學實驗中,精密六自由度平臺能夠精...
2025-06-10 -
液壓六自由度平臺模型
60噸六自由度平臺具有強大的承載能力,適用于大型設備和重載工況的模擬與測試。在航空航天領域,它可用于大型飛行器的地面模擬試驗,對飛行器的起落架、機翼等關鍵部件進行強度和耐久性測試,確保飛行器在飛行過程中的安全性。在船舶制造中,60噸六自由度平臺能夠模擬船舶在海...
2025-06-10