-
 寧夏減少人工的全自動鋼筋桁架焊接生產(chǎn)線聯(lián)系方式
寧夏減少人工的全自動鋼筋桁架焊接生產(chǎn)線聯(lián)系方式隨著城市規(guī)模的日益擴張,新一輪工業(yè)的進(jìn)行以及自動化技術(shù)不斷更新?lián)Q代,工業(yè)轉(zhuǎn)型的呼聲日漸高漲。多高層鋼結(jié)構(gòu)的迅猛發(fā)展,對于工程工期、質(zhì)量都提出了更高的要求。而在施工建設(shè)環(huán)節(jié)中的樓板施工方法,往往是影響工期的重要因素。混凝土預(yù)制構(gòu)件幾乎無處不在,而在超高層采用PC...
2025-07-17 -
 天津本地全自動鋼筋桁架焊接生產(chǎn)線按需定制
天津本地全自動鋼筋桁架焊接生產(chǎn)線按需定制開洞直徑或?qū)挾葹?00~1000mm時加設(shè)加強筋。5、鋼桁架臨時支撐施工部分鋼桁架模板中間需設(shè)置臨時支撐,可根據(jù)樓層高度采用多種不同高度的門式架搭設(shè)而成,門式架間距18m,上鋪100×100木枋,如圖。鋼桁架臨時支撐示意圖6、輕質(zhì)加氣砌塊的放置根據(jù)結(jié)構(gòu)特點,為...
2025-07-17 -
 重慶鋼筋籠滾籠焊接機批發(fā)價格
重慶鋼筋籠滾籠焊接機批發(fā)價格地下連續(xù)墻施工時對于鋼筋籠無法下放到位的預(yù)防及處理措施成槽垂直度影響成槽垂直度是保證鋼筋籠順利下放的首要關(guān)鍵,對于“一”字型槽段的垂直度須控制在設(shè)計要求以內(nèi)可保證鋼筋籠順利入槽;對于異型槽段的垂直度須控制在設(shè)計要求以內(nèi)方可保證鋼筋籠順利入槽。鋼筋籠制作影響鋼筋...
2025-07-17 -
 廣西如何定制全自動鋼筋桁架焊接生產(chǎn)線
廣西如何定制全自動鋼筋桁架焊接生產(chǎn)線如開口壓型鋼板、縮口壓型鋼板,要作雙向樓板,則必須**壓型鋼板的肋高,從而增加了樓板結(jié)構(gòu)層的總厚度,導(dǎo)致建筑凈高、結(jié)構(gòu)自重、造價等方面受到不利影響。鋼筋柘架混凝土樓板按雙向板計算時與普通現(xiàn)澆混凝土設(shè)計理論等同,而其鋼筋柘架受力模式更為合理,能提供更大的剛度,且...
2025-07-17 -
 湖南全自動數(shù)控鋼筋鋼筋籠滾籠焊接機生產(chǎn)
湖南全自動數(shù)控鋼筋鋼筋籠滾籠焊接機生產(chǎn)保證在35d或500m范圍內(nèi)搭接頭的數(shù)量不超過主筋的50%,加勁箍制作時應(yīng)確保樁主筋的保護層不得小于50mm,螺旋盤分段長度滿足可綁3~5圈所需的鋼筋長度;樁端水平箍筋不得少于3道。3挖孔樁鋼筋籠吊裝施工方法挖孔樁鋼筋籠在孔上制作成型后,為確保挖孔樁鋼筋籠吊裝...
2025-07-16 -
 寧夏物聯(lián)網(wǎng)技術(shù)的全自動鋼筋桁架焊接生產(chǎn)線廠家直銷
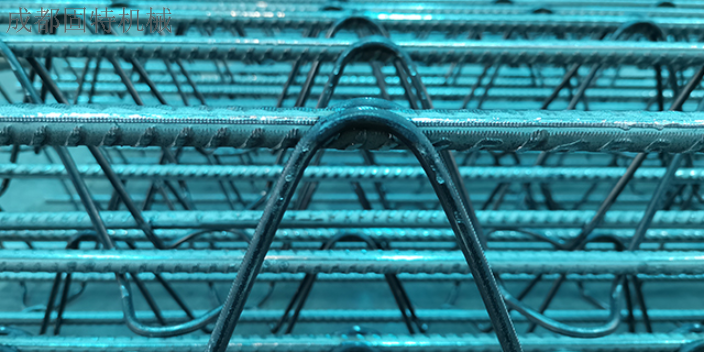
寧夏物聯(lián)網(wǎng)技術(shù)的全自動鋼筋桁架焊接生產(chǎn)線廠家直銷下面我們就定義鋼筋柘架樓承板進(jìn)行簡要的介紹。鋼筋格架樓承板是指,把已焊接成格架的鋼筋與鍍鋅鋼板(也就是樓板)相結(jié)合,形成的一種樓板與鋼筋一體的建筑材料。在工程醒目中鋼筋柘架樓承板的在不同的階段都可以發(fā)揮出自己獨特的作用。例如人們在工程進(jìn)行施工時,它能夠很多的正...
2025-07-16 -
 河北減少人工的全自動鋼筋桁架焊接生產(chǎn)線聯(lián)系方式
河北減少人工的全自動鋼筋桁架焊接生產(chǎn)線聯(lián)系方式改善了樓板的使用性能和耐久性。采用鋼筋柘架樓承板后可根據(jù)需要將樓板設(shè)計成雙向板,等同于傳統(tǒng)的現(xiàn)澆鋼筋混凝土雙向配筋樓板,而壓型鋼板組合樓板是難以實現(xiàn)雙向板的,采用雙向板減小樓板結(jié)構(gòu)層厚度、降低結(jié)構(gòu)自重,增大跨度和開間,而且更加經(jīng)濟合理。鋼筋析架樓承板的樓板比使...
2025-07-16 -
 云南全自動數(shù)控鋼筋籠滾籠焊接機售后服務(wù)
云南全自動數(shù)控鋼筋籠滾籠焊接機售后服務(wù)根據(jù)施工要求,首先調(diào)整鋼筋籠滾焊機兩滾筒間距離,將鋼筋籠的筋架預(yù)制好吊裝到鋼筋籠繞筋機兩滾筒之間,通過穿過矯直器將盤筋穿入鋼筋籠,把盤筋(繞筋)端頭先焊接在一根主筋上,然后通過固定旋轉(zhuǎn)及移動旋轉(zhuǎn)盤轉(zhuǎn)動把繞筋纏繞在主筋上,同時進(jìn)行焊接,從而形成產(chǎn)品鋼筋籠,這就是...
2025-07-16 -
 廣西哪里有全自動鋼筋桁架焊接生產(chǎn)線廠家直銷
廣西哪里有全自動鋼筋桁架焊接生產(chǎn)線廠家直銷鋼筋桁架樓承板是將樓板中的鋼筋在工廠加工成鋼筋桁架,并將鋼筋桁架與鍍鋅鋼板焊成一體的組合模板,具有施工速度快、gao強度等特點,能直接應(yīng)用于學(xué)校、醫(yī)院、圖書館、大劇院等公共建筑及多層鋼結(jié)構(gòu)等建筑中。施工時,鋼筋桁架樓承板可隨施工荷載,直接鋪設(shè)到梁上,然后再進(jìn)行...
2025-07-16 -
山西哪里有全自動鋼筋桁架焊接生產(chǎn)線聯(lián)系方式
樓板強度和剛度即鋼筋桁架的強度和剛度,鋼筋桁架模板自重、混凝土重量及施工荷載全由鋼筋桁架承受。混凝土結(jié)硬是在鋼筋桁架模板變形下進(jìn)行的,所以樓板自重不會使板底混凝土產(chǎn)生拉力,在除樓板自重以外的yong久荷載及樓面活荷載作用下,板底混凝土才產(chǎn)生拉力。這樣,樓板開裂...
2025-07-16 -
 甘肅樓承板全自動鋼筋桁架焊接生產(chǎn)線的案例
甘肅樓承板全自動鋼筋桁架焊接生產(chǎn)線的案例相信建筑工地鋼筋工們都知道鋼結(jié)構(gòu)具有強度高,自重輕,結(jié)構(gòu)可靠性高,綠色環(huán)保,可重復(fù)利用等優(yōu)勢,使其在結(jié)構(gòu)施工中應(yīng)用愈發(fā)guang泛。下面小編為大家簡單總結(jié)了兩種焊接的方法,希望對于一些剛剛?cè)胄械焦び褞韼椭唧w如下:一、組裝焊接1、按次序進(jìn)行拼裝,當(dāng)有隱蔽焊...
2025-07-16 -
 天津哪里有全自動鋼筋桁架焊接生產(chǎn)線批發(fā)價格
天津哪里有全自動鋼筋桁架焊接生產(chǎn)線批發(fā)價格上下層鋼筋混凝土保護層厚度能保證符合設(shè)計要求。有效地解決了混凝土漏漿現(xiàn)象的發(fā)生。3鋼筋格架樓承板與壓型鋼板的技術(shù)性能比較、使用階段作受力鋼筋的壓型鋼板組合樓板,例如閉口壓型鋼板、開口壓型鋼板、縮口壓型鋼板,當(dāng)鋼-砼組合樓板過火后,由于過火時間、組合樓板抗火性能...
2025-07-16 -
青海減少人工的全自動鋼筋桁架焊接生產(chǎn)線設(shè)備
相信建筑工地鋼筋工們都知道鋼結(jié)構(gòu)具有強度高,自重輕,結(jié)構(gòu)可靠性高,綠色環(huán)保,可重復(fù)利用等優(yōu)勢,使其在結(jié)構(gòu)施工中應(yīng)用愈發(fā)guang泛。下面小編為大家簡單總結(jié)了兩種焊接的方法,希望對于一些剛剛?cè)胄械焦び褞韼椭唧w如下:一、組裝焊接1、按次序進(jìn)行拼裝,當(dāng)有隱蔽焊...
2025-07-16 -
 貴州固特機械鋼筋籠滾籠焊接機批發(fā)
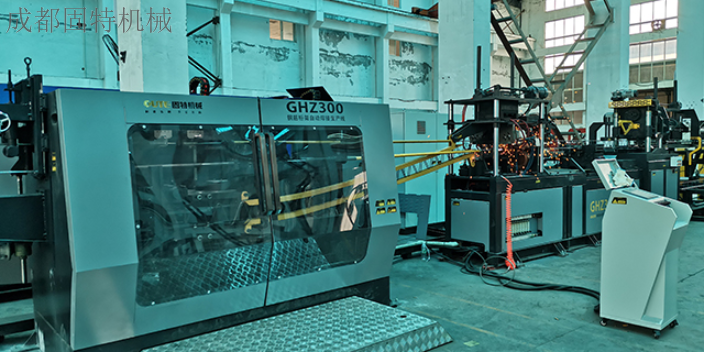
貴州固特機械鋼筋籠滾籠焊接機批發(fā)數(shù)控鋼筋籠滾焊機產(chǎn)品設(shè)計特點說明1行走驅(qū)動采用硬齒面減速機,力矩大,結(jié)構(gòu)緊湊,噪音小。2.行走部分采用齒輪齒條嚙合傳動,行走精度高。3.旋轉(zhuǎn)采用鏈輪與鏈條傳動,鏈條松緊可調(diào),傳動平穩(wěn),保證了移動盤和固定盤旋轉(zhuǎn)同步。4.分料桿與分料盤均由數(shù)控加工中心加工,保證了...
2025-07-16 -
 云南鋼筋彎曲鋼筋剪切生產(chǎn)線一體化
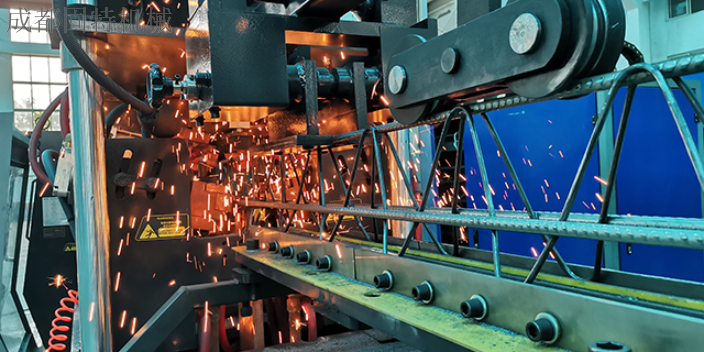
云南鋼筋彎曲鋼筋剪切生產(chǎn)線一體化數(shù)控鋼筋剪切線,鋼筋棚標(biāo)準(zhǔn)化施工越來越多客戶開始選擇的產(chǎn)品,和鋼筋彎曲中心配合使用,是大批量剪切指定鋼筋尺寸的利器。1、數(shù)控棒材鋼筋剪切線(又名筋研智能數(shù)控鋼筋剪切線,鋼筋剪切生產(chǎn)線,全自動鋼筋剪切線等)設(shè)備產(chǎn)品介紹:該機引進(jìn)歐洲設(shè)計理念,經(jīng)消化吸收并結(jié)合國內(nèi)...
2025-07-16 -
 橋梁箱梁生產(chǎn)線怎么樣
橋梁箱梁生產(chǎn)線怎么樣制作漫游動畫,逼真顯示橋梁結(jié)構(gòu)和所處環(huán)境,以第三人的視角,多、多角度地反映橋體所在位置、結(jié)構(gòu)形式、細(xì)部構(gòu)造等(圖12),為相關(guān)部門的工程技術(shù)人員提供可視化平臺,直觀、形象地了解工程物的全貌。圖12模型導(dǎo)入格式目前Lumion支持的導(dǎo)入格式有SKP、DAE、FB...
2025-07-16 -
 陜西什么是鋼筋剪切生產(chǎn)線節(jié)省多少人工
陜西什么是鋼筋剪切生產(chǎn)線節(jié)省多少人工數(shù)控鋼筋剪切生產(chǎn)線設(shè)備參數(shù):序號型號FHS-200FHS-150FHS-1201切刀大剪切力2000kn1500kn1200kn2剪切頻率12pcs/min12pcs/min12pcs/min3鋼筋傳送速度±2mm/m±2mm/m±2mm/m5剪切鋼筋直徑范圍...
2025-07-16 -
浙江智能鋼筋籠滾籠焊接機廠家直銷
保護層的設(shè)置:鋼筋籠保護層**好設(shè)置為混凝土澆道塊,其厚度為混凝土保護層厚度。每隔2m均勻布置四層保護層,焊接在主筋上,以保證保護層厚度,減少對孔壁的擾動。鋼筋籠垂直對準(zhǔn)孔中心后,應(yīng)緩慢下放,以免“︺”鋼筋(又稱鋼筋耳)劃傷孔壁。但在實際施工中,設(shè)計中使用的“...
2025-07-16 -
 陜西全自動數(shù)控鋼筋鋼筋籠滾籠焊接機哪家強
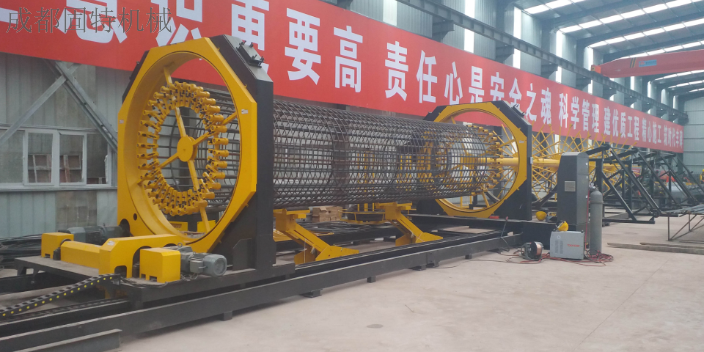
陜西全自動數(shù)控鋼筋鋼筋籠滾籠焊接機哪家強數(shù)控鋼筋籠滾焊機工作原理根據(jù)施工要求,先將主筋穿過固定轉(zhuǎn)盤中相應(yīng)模板的導(dǎo)管穿至移動轉(zhuǎn)盤的相應(yīng)套管中,進(jìn)行固定。把繞筋端頭先焊接在一根主筋上。然后通過固定轉(zhuǎn)盤及移動轉(zhuǎn)盤轉(zhuǎn)動,把繞筋纏繞在主筋(移動盤是一邊旋轉(zhuǎn)一邊前進(jìn)),同時進(jìn)行焊接,直至焊到主筋末端規(guī)定位置,即...
2025-07-16 -
江西固特機械數(shù)控鋼筋籠滾籠焊接機批發(fā)價格
為什么我說買鋼筋籠滾焊機不吃虧?很多的路橋工程和隧道工程中樁基礎(chǔ)工程多,因此用到的鋼筋籠很多。施工方急需一種能夠快速生產(chǎn)標(biāo)準(zhǔn)化鋼筋籠的設(shè)備來解決燃眉之急。鋼筋籠繞筋機就是這樣一種低成本的半自動化設(shè)備。相信還有很多人對鋼筋籠繞筋機這種設(shè)備感到陌生。來給大家介紹一...
2025-07-16 -
 浙江個性化橋面板鋼筋加工方案
浙江個性化橋面板鋼筋加工方案橋面板鋼筋加工需要注重施工人員的技術(shù)培訓(xùn)和安全教育。鋼筋加工是一項技術(shù)性較強的工作,要求施工人員具備一定的專業(yè)知識和技能。在招聘和培訓(xùn)施工人員時,要注重其專業(yè)素質(zhì)和工作經(jīng)驗,確保施工人員能夠熟練掌握鋼筋加工的技術(shù)要求。同時,要加強施工人員的安全教育,提高他們的...
2025-07-16 -
西藏固特機械鋼筋籠滾籠焊接機按需定制
數(shù)控鋼筋籠滾焊機產(chǎn)品設(shè)計特點說明1行走驅(qū)動采用硬齒面減速機,力矩大,結(jié)構(gòu)緊湊,噪音小。2.行走部分采用齒輪齒條嚙合傳動,行走精度高。3.旋轉(zhuǎn)采用鏈輪與鏈條傳動,鏈條松緊可調(diào),傳動平穩(wěn),保證了移動盤和固定盤旋轉(zhuǎn)同步。4.分料桿與分料盤均由數(shù)控加工中心加工,保證了...
2025-07-16 -
 青海樓承板鋼筋籠滾籠焊接機廠家直銷
青海樓承板鋼筋籠滾籠焊接機廠家直銷數(shù)控鋼筋籠繞筋機是建筑行業(yè)中以手工工藝制作的各種圓型鋼筋籠,采用半自動的方法去完成其繞筋成型整個工藝過程的zhuan用機械裝備(亦可在膠輥上制作骨架)。數(shù)控鋼筋籠繞筋機采用自動送線機構(gòu),自動焊接,焊點精細(xì),變頻控制拖籠機構(gòu),自動上料裝置,降低人工勞動強度,提高...
2025-07-16 -
 廣西數(shù)控鋼筋籠滾籠焊接機怎么樣
廣西數(shù)控鋼筋籠滾籠焊接機怎么樣進(jìn)場鋼筋的規(guī)格和質(zhì)量應(yīng)符合設(shè)計要求,并附有質(zhì)保書。原材料按施工規(guī)范要求取樣送檢。(2)鋼籠制作前,將主筋矯直,qing除鋼筋表面的污垢和銹蝕,準(zhǔn)確控制下料長度。(3)鋼筋籠采用環(huán)形模制作:鋼筋籠應(yīng)按設(shè)計長度整體制作;主筋和加固筋應(yīng)點焊牢固,不得損傷主筋;使用E...
2025-07-16 -
安徽全自動鋼筋籠滾籠焊接機公司
計算鋼筋籠長度尺寸時,除要注意接頭位置錯開,還要注意計算上焊接長度。分段制作的鋼筋籠的長度以鋼筋的定長為宜,但不宜短于6m,連接時50%的鋼筋接頭應(yīng)予錯開焊接,且兩鋼筋軸心在一直線上。為避免灌注導(dǎo)管掛籠及鋼筋籠上浮,籠底鋼筋可略成喇叭狀。在夜間施工時要特別注意...
2025-07-16 -
 廣西哪里有全自動鋼筋桁架焊接生產(chǎn)線哪家強
廣西哪里有全自動鋼筋桁架焊接生產(chǎn)線哪家強鋼筋桁架樓承板——樓板施工的gai革之作洲翔裝配飾建筑無錫洲翔企業(yè)隨著施工技術(shù)的發(fā)展,建筑行業(yè)有了日新月異的變化。鋼筋桁架樓承板(以下簡稱鋼承板)較傳統(tǒng)施工工藝具有經(jīng)濟性、安全性、便捷性和可靠性等優(yōu)點,近年來在建筑行業(yè)得以迅速推廣和應(yīng)用。鋼承板介紹1.鋼承板是...
2025-07-16 -
浙江無人化生產(chǎn)全自動鋼筋桁架焊接生產(chǎn)線的案例
樓板強度和剛度即鋼筋桁架的強度和剛度,鋼筋桁架模板自重、混凝土重量及施工荷載全由鋼筋桁架承受。混凝土結(jié)硬是在鋼筋桁架模板變形下進(jìn)行的,所以樓板自重不會使板底混凝土產(chǎn)生拉力,在除樓板自重以外的yong久荷載及樓面活荷載作用下,板底混凝土才產(chǎn)生拉力。這樣,樓板開裂...
2025-07-16 -
 浙江固特機械數(shù)控鋼筋籠滾籠焊接機哪家強
浙江固特機械數(shù)控鋼筋籠滾籠焊接機哪家強數(shù)控鋼筋籠滾焊機是一種由PLC控制的加工生產(chǎn)鋼筋籠的設(shè)備。中文名鋼筋籠滾焊機性質(zhì)滾焊機屬性鋼筋籠是一種由PLC控制的加工生產(chǎn)鋼筋籠的設(shè)備目錄1概念2工作原理3精度保障4設(shè)備特點5人員配置6設(shè)備參數(shù)鋼筋籠滾焊機概念編輯播報數(shù)控鋼筋籠滾焊機是一種由PLC控制的加工...
2025-07-16 -
 遼寧裝配式全自動鋼筋桁架焊接生產(chǎn)線如何定制
遼寧裝配式全自動鋼筋桁架焊接生產(chǎn)線如何定制在對于層數(shù)不高的工業(yè)廠房還是比較合適的。這個可以規(guī)避鋼筋桁架板在高層建筑里大量占用吊車的弊端。那鋼筋桁架板的缺點呢?1.我認(rèn)為在跨距,鋼筋桁架的價格不便宜;2.鋼筋桁架板的運輸費用較高,且在運輸過程中造成搭接端的損壞,這樣就需要施工現(xiàn)場修復(fù),影響安裝進(jìn)度和造成...
2025-07-16 -
 山東國內(nèi)橋面板鋼筋加工方案產(chǎn)品介紹
山東國內(nèi)橋面板鋼筋加工方案產(chǎn)品介紹橋面板鋼筋的加工需要特別關(guān)注施工工藝和質(zhì)量控制。鋼筋加工是橋梁建設(shè)中至關(guān)重要的一環(huán),施工工藝和質(zhì)量控制直接影響著橋梁的使用壽命和安全性。在施工過程中,必須嚴(yán)格按照施工工藝要求進(jìn)行操作,以確保鋼筋的加工精度和質(zhì)量。同時,施工現(xiàn)場的管理也需要加強,以確保施工過程的...
2025-07-16